
The Golem Project
Hod Lipson and Jordan B. Pollack

|
|
|
|
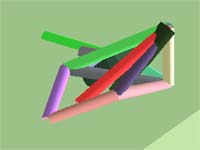
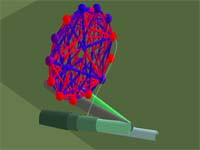
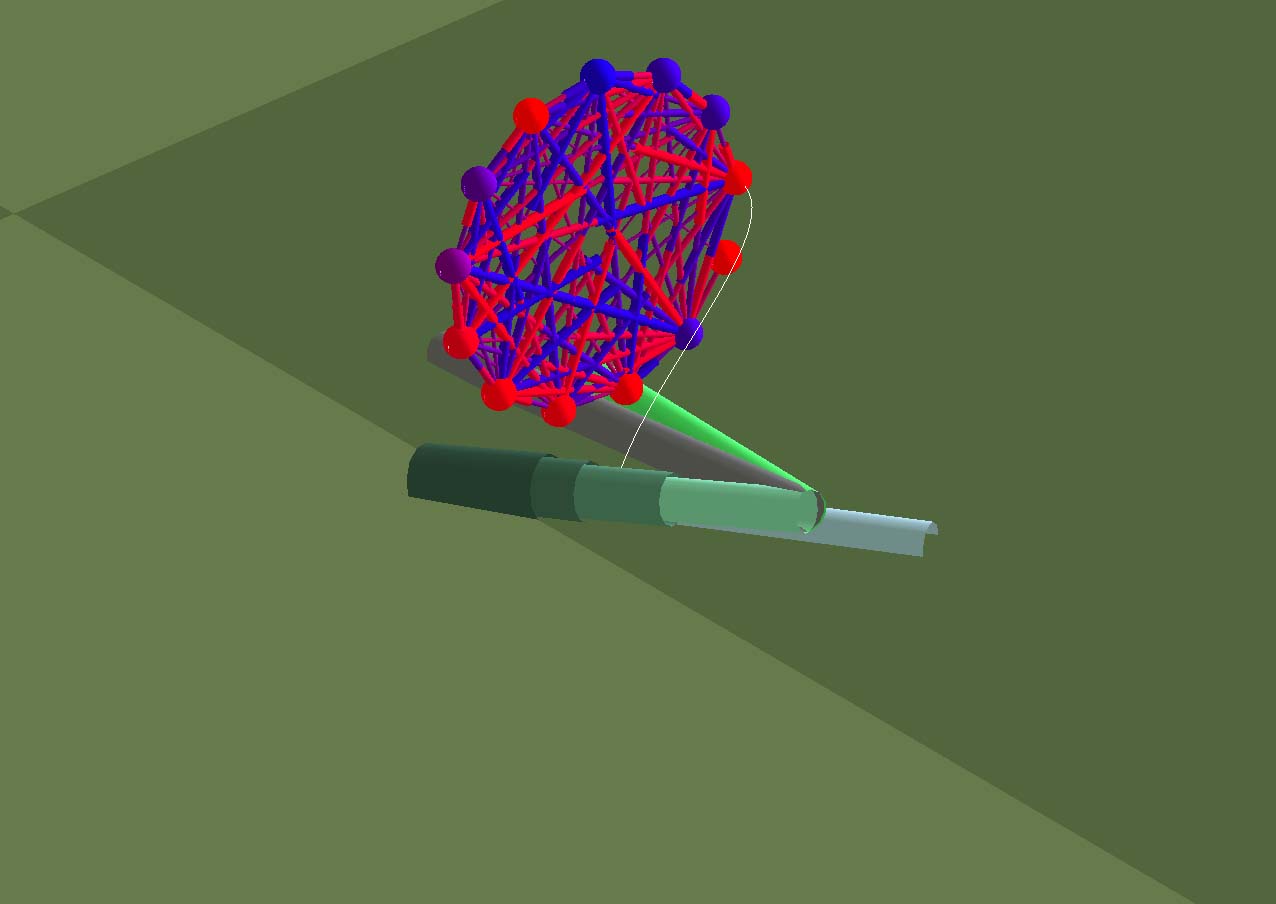
In spite of the relatively simple task and environment (locomotion over an infinite horizontal plane), surprisingly different and elaborate solutions were evolved. Machines typically contained around 20 building blocks, sometimes with significant redundancy (perhaps to make mutation less likely to be catastrophic ). Not less surprising was the fact that some exhibited symmetry, which was neither specified nor rewarded for anywhere in the code; a possible explanation is that symmetric machines are more likely to move in a straight line, consequently covering a greater net distance and acquiring more fitness. Similarly, successful designs appear to be robust in the sense that changes to bar lengths would not significantly hamper their mobility.
Some examples are shown below. Where available, click on the image to see it in motion.
Arrow
|
|
|
Tetra
|
  |
|
Ratchet
|
  |
|
Snake
|
  |
|
Biped
|
  |
Crab
|
  |
Complex1
|
 |
|
Complex2
|
 |
|
Tee
|
 |
|
Balance
|
 |
|
Simple
|
 |
|
Copyright (c) 2000 Lipson & Pollack |
[email protected] |
Updated |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}